FUENTE: www.xakata.com
AUTOR: CARLOS PREGO
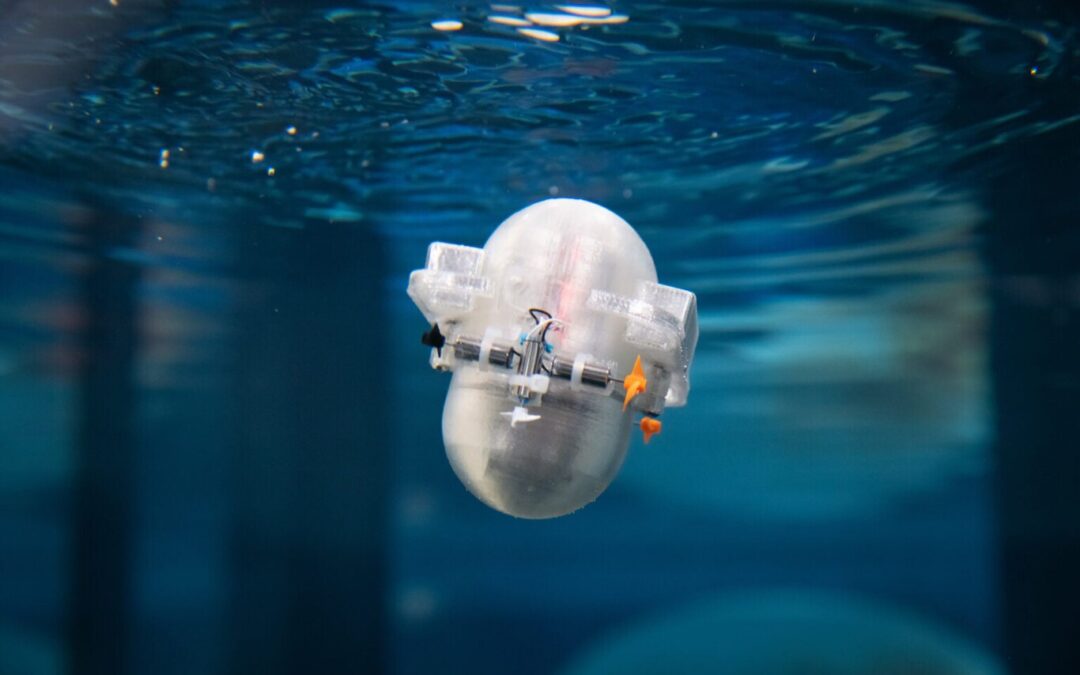
No mide más de un palmo y, por parecer, se parece más a una especie de píldora que a un complejo robot con Inteligencia Artificial (IA), pero CARL-Bot, el dispositivo en el que está trabajando un grupo de investigadores de Caltech, el ETH Zurich y Harvard, promete revolucionar el estudio de los océanos. Quién sabe, puede incluso que el de otros planetas con amplias extensiones de agua, como Encélado o Europa, satélites, respectivamente, de Saturno y Júpiter.
A diferencia de otros robots y dispositivos empleados por los científicos para al estudio de los océanos, CAR-Bot ofrece una peculiaridad especial: mediante inteligencia artificial sus creadores quieren que sea autónomo y pueda moverse con libertad por las corrientes oceánicas. No como lo haría una baliza, a la deriva, sino monitorizando las condiciones del agua y aprovechando las redes de aprendizaje por refuerzo (RL), que, a diferencia de las redes neurales convencionales, no se entrenan con un conjunto de datos estadísticos, sino a base de acumular experiencia.
Un aliado único para las profundidades del océano
Puede parecer una nueva vuelta de tuerca, pero en realidad se trata de una habilidad fundamental para ahondar en el conocimiento de los océanos, sobre todo de aquellas regiones más inhóspitas, inaccesibles y que menos se han investigado hasta la fecha. “Cuando queremos que los robots exploren las profundidades del océano, especialmente en enjambres, es casi imposible controlarlos con un joystick desde 20.000 pies de distancia [alrededor de seis kilómetros] en la superficie. Tampoco podemos proporcionarles datos sobre las corrientes oceánicas locales que necesitan para navegar porque no podemos detectarlos desde la superficie”, explica John O. Dabiri, profesor de Aeronáutica e Ingeniería Mecánica, en un artículo publicado por la Universidad de Caltech.

Lo que los investigadores necesitan son, incide Dabiri, drones capacitados para “tomar decisiones sobre cómo moverse por sí mismos”. Y a ese ambicioso objetivo apunta precisamente el robot CARL-Bot. El rendimiento de la AI se ha probado ya mediante simulaciones con computadoras que emulaban vórtices y le han enseñado a aprovechar las regiones de baja velocidad valorando la información de su entorno inmediato. ¿La razón? En el futuro CARL-Bot dependerá fundamentalmente de los datos que capte con un giroscopio y un acelerómetro.
El sistema es similar al que usan las propias águilas y halcones para desplazarse entre las corrientes de aire. “Sorprendentemente, los investigadores descubrieron que su algoritmo de aprendizaje por refuerzo podría aprender estrategias de navegación que son incluso más efectivas que las que se cree que utilizan los peces reales en el océano”, destaca el artículo publicado por la propia Caltech: “Inicialmente solo esperábamos que la IA pudiera competir con las estrategias de navegación que ya se encuentran en los animales nadadores reales, por lo que nos sorprendió ver que aprendía métodos aún más efectivos al explorar repetidos ensayos en la computadora”.
La investigación, en cualquier caso, todavía está en desarrollo y debe enfrentar a la IA a los diferentes escenarios que podría encontrarse en mar abierto, como vórtices arremolinados o corrientes. A su favor, el equipo de investigadores tiene la experiencia que ya ha acumulado con el trabajo con medusas. Los resultados iniciales se han publicado en Nature Communications.
Además de refinar la IA, el equipo ha empezado a experimentar también con el propio robot. Tras una primera prueba en una pequeña bañera, un entorno bien controlado, ha pasado a un tanque de mayor tamaño y en el futuro prevén testar el dispositivo en una piscina con chorros capaces de generar corrientes horizontales y en la que CARL-bot pueda desplazarse con movimientos verticales o aprender a mantenerse a cierta profundidad con varias corrientes.
“En última instancia, queremos a CARL en el mundo real. Dejará el nido y se irá al océano y, con repetidas pruebas allí, el objetivo sería que aprenda a navegar por su propia cuenta”, explica Dabiri a Popular Science. Para garantizar que tendrá un tamaño reducido que facilite su labor o incluso el uso de “enjambres” de robots, los investigadores desarrollaron un software que puede instalarse en un Teensy de 2,4 a 0,7 pulgadas. El objetivo es que su movimiento sea lo más eficiente posible, pero puede permanecer en un entorno controlado gracias a una batería de iones de litio.







