Los bots biomiméticos pueden enseñar mucho a los investigadores sobre cómo interactúan las criaturas en el mundo natural
FUENTE: www.smithsonianmag.com
AUTOR: Bob Holmes
Las abejas bailan para dirigir a los compañeros de la colmena hacia nuevas fuentes de alimento. Los guppies (pez) negocian el liderazgo con sus compañeros de escuela. Bandadas de palomas mensajeras toman medidas evasivas cuando ataca un halcón. Desde los albores de la investigación del comportamiento animal, los científicos han estudiado interacciones sociales como estas. Pero ahora hay un nuevo giro en su investigación: aquí, uno de los actores no es un animal real, sino un robot. Bajo el control de los investigadores, estos robots socializan con criaturas de carne y hueso en experimentos que los científicos esperan que proporcionen nuevos conocimientos sobre lo que significa ser un guppy socialmente competente, cómo las abejas educan a sus compañeros de colmena y otras características de la vida social animal.
La noción no es tan peculiar como parece. Los avances en la tecnología robótica y la potencia informática significan que los ingenieros pueden construir robots lo suficientemente realistas como para que los animales respondan a ellos como si fueran reales. (El grado de realismo «suficientemente realista» varía según los animales que se estudian. A veces, el robot tiene que verse bien, a veces tiene que oler bien y, a veces, todo lo que tiene que hacer es moverse).
Y los robots ofrecen una gran ventaja sobre los animales vivos: hacen lo que los investigadores les dicen que hagan, exactamente de la misma manera, una y otra vez. Eso les da a los científicos un grado de control sobre sus experimentos que puede ser difícil o imposible de lograr de otra manera. «Si puedes construir un robot que puedas incrustar en un grupo de animales como un títere, y ellos aceptan a ese robot como uno de ellos, entonces puedes hacer que el robot haga cosas y ver cómo responden los animales reales», dice Dora Biro. investigador de cognición animal en la Universidad de Rochester, Nueva York.
Con los robots, los investigadores pueden separar factores, como el tamaño de un pez y su experiencia, que están indisolublemente ligados en los animales reales. Pueden exponer a los animales a exactamente el mismo estímulo una y otra vez, acelerando el proceso experimental. Y a veces, pueden hacer todo esto sin exponer a los animales al riesgo de depredadores reales o especies potencialmente invasoras.
Aquí hay cinco robots biomiméticos o similares a animales que los investigadores ya están usando para estudiar y, en un caso, para controlar, la vida social de los animales de la vida real.
Robobee está en la colmena
El famoso «baile de meneo» de las abejas, en el que un trabajador que regresa a la colmena señala la ubicación de una fuente de alimento corriendo en patrones específicos cerca de la entrada de la colmena mientras vibra sus alas y su cuerpo, se conoce desde hace más de 60 años. . Pero los investigadores aún no saben exactamente cómo los compañeros de la colmena decodifican su mensaje. “¿Cuáles son las señales aquí? ¿Cuáles son los componentes del baile que realmente llevan información y cuáles son solo un subproducto? » dice Tim Landgraf, un especialista en robótica de la Universidad Libre de Berlín. Esto, pensó, era un trabajo para Robobee.
Landgraf construyó una réplica de abeja de tamaño natural, solo una mancha de plástico con una vaga forma de abeja con una sola ala, y la conectó a un sistema de transmisión mecánica que le permitió variar dónde y cómo se movía y vibraba la réplica. Después de insertar la abeja en la colmena, Landgraf descubrió que, de hecho, podía dirigir abejas reales a una fuente de alimento , incluso una que nunca antes habían usado: una prueba sólida de principios.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer_public/27/52/2752c15d-6ca2-4d6a-9506-29e9a57403da/robobee.jpeg)
Pero los éxitos de Robobee no ocurrieron de manera confiable. “A veces, las abejas los seguían en cuestión de segundos”, dice Landgraf. «Pero a veces tomaba días y no sabíamos por qué». Eso le hizo darse cuenta de que había otra faceta en la comunicación de la danza que nunca había considerado: cómo las abejas deciden a qué bailarina seguir y cuándo. ¿Están las abejas seguidoras potenciales buscando activamente información sobre fuentes de alimento, se preguntó, o la bailarina de alguna manera tiene que persuadirlas para que escuchen? ¿Solo ciertos trabajadores individuales son receptivos a una señal en particular, como resultado de su experiencia previa?
Para responder a estas preguntas, Landgraf y su equipo están desarrollando un Robobee mejorado con un olor más realista y un mecanismo de vibración de alas más confiable para entrar en una colmena llena de abejas marcadas individualmente cuya experiencia pueden rastrear. Después de los inevitables retrasos relacionados con Covid, finalmente comenzaron a probar el sistema, pero aún no está listo para hablar sobre los resultados. Sin embargo, dice: «Creo que hay muchas posibilidades de encontrar algo».
Halcón robótico a la caza
Cuando ataca un halcón, ¿cómo responde una bandada de palomas? La teoría clásica, a menudo llamada hipótesis de la «manada egoísta», asume que cada paloma simplemente intenta meterse en el medio de la bandada, de modo que el depredador se lleva a algún otro pájaro desafortunado. Pero esa idea no es fácil de probar. Cada golpe de halcón es diferente: algunos comienzan un poco más arriba que otros, o desde un ángulo diferente, y toda esta variabilidad puede afectar la respuesta de las palomas. Así que Daniel Sankey, un ecologista del comportamiento que ahora trabaja en la Universidad de Exeter en el Reino Unido, recurrió a un robot.
“Pensamos en ello como una forma muy controlada de realizar este estudio”, dice Sankey. «Podías asegurarte de que el halcón siempre estuviera exactamente 20 metros atrás cuando se soltaron las palomas, lo que lo hacía repetible». Además, señala, el robot era más seguro para las palomas. «Sé que un halcón adiestrado en el pasado ha destruido absolutamente una bandada de palomas».
Con la ayuda del halcón robótico de un entusiasta de los halcones, de apariencia realista, excepto por las hélices que lo impulsan, Sankey atacó repetidamente una bandada de palomas mensajeras, mientras rastreaba la posición de cada ave por GPS. Contrariamente a la hipótesis del rebaño egoísta, las palomas no tenían más probabilidades de moverse al medio del rebaño cuando estaban bajo ataque que cuando no las molestaban, descubrió.
En cambio, el análisis de Sankey mostró que las palomas en su mayoría intentaron volar en la misma dirección que sus compañeros de bandada, de modo que la bandada esquivó al unísono, sin dejar rezagados para que el depredador los atrapara. “Esto sugiere que al alinearse unos con otros, pueden escapar del depredador como grupo, para que nadie sea devorado”, dice. Si bien no es una prueba concluyente, esto sugiere que la bandada de palomas puede ser cooperativa, no egoísta .
Robofish en la escuela
¿Qué peces de un banco tienen más probabilidades de liderar el grupo? La mayoría de los estudios han sugerido que los peces más grandes tienden a tener la mayor influencia sobre el lugar donde nada el banco, pero hay un problema: los peces grandes también son mayores y tienen más experiencia, y pueden actuar de manera diferente a sus compañeros de escuela más pequeños. ¿Cuál de estas diferencias tiene el efecto más fuerte sobre quién se convierte en líder? Eso es difícil de probar con peces reales. “¿Cómo puedes hacer que un pez grande se comporte como uno pequeño? Este es el tipo de cosas que solo se pueden probar con robots ”, dice Jens Krause, un conductista animal de la Universidad Humboldt de Berlín, quien fue coautor de una descripción general de los robots en la investigación del comportamiento en la Revisión anual de control, robótica y sistemas autónomos de 2021 .
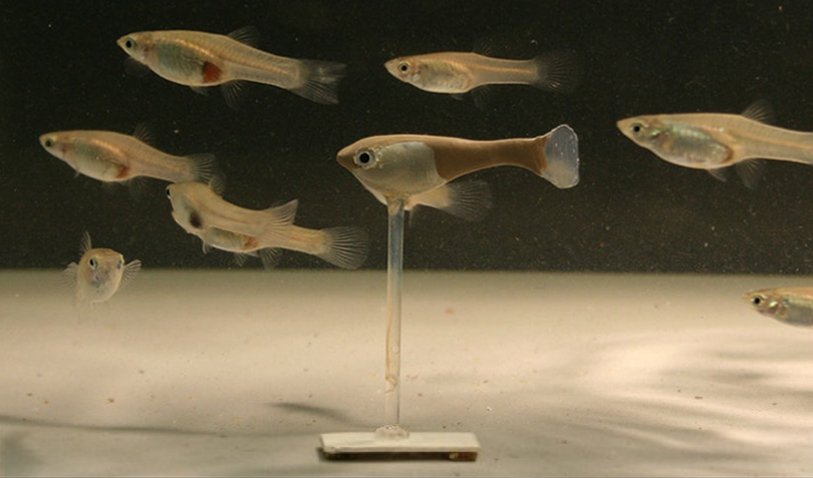
Entonces, Krause y sus colegas desarrollaron Robofish, una réplica impresa en 3D de un guppy montado en un pedestal magnético e impulsado por una unidad motorizada debajo del tanque. Dos cámaras de video acopladas a computadoras le permiten a Robofish responder a los movimientos de sus compañeros de escuela en tiempo real.
Mientras el modelo tuviera ojos y un patrón de color vagamente realista, descubrieron que los guppies se comportaban con el modelo de la misma forma que lo hacían con cualquier otro pez. Esto permitió a los investigadores intercambiar versiones más grandes o más pequeñas de Robofish manteniendo idénticos todos los demás aspectos de su comportamiento, para estudiar solo el efecto del tamaño. Efectivamente, descubrieron que era más probable que los guppies reales siguieran a los líderes Robofish más grandes . El equipo también ha utilizado Robofish para estudiar cómo las velocidades de natación de los individuos afectan el comportamiento de la escuela .
Y el equipo de Krause aprendió otra cosa sorprendente sobre el liderazgo sospechoso: la cortesía ayuda. Las primeras versiones de su programa de control Robofish hicieron que el robot se acercara demasiado a los compañeros de escuela, lo que provocó que el pez real retrocediera. “Teníamos algunos robots que terminaron persiguiendo a los peces”, recuerda Krause. Después de que el equipo modificó el robot para que respetara el espacio de sus compañeros de escuela, el nuevo Robofish «socialmente competente» demostró ser mucho mejor para atraer seguidores .
Robots de termitas en un enjambre
Los estudios anteriores utilizaron robots para infiltrarse en grupos reales de animales y provocar una respuesta. Pero hay otra forma de usar robots para comprender el comportamiento de los animales: programe un enjambre de robots para que actúen de acuerdo con las reglas que usted cree que siguen los animales reales y vea si el resultado imita cómo actúan los animales.
Ese es el enfoque seguido por Justin Werfel, investigador de comportamiento colectivo en Harvard. Werfel quería entender cómo las termitas construyen montículos tan intrincados, que se destacan por los conjuntos de chimeneas estriadas en sus entradas. Se centró en un solo paso del proceso: cómo las termitas que transportan el suelo excavado del montículo eligen dónde tirarlo. Esta simple decisión determina la forma compleja de la entrada del montículo.
Werfel y sus colegas tenían alguna evidencia que sugiere que las termitas podrían dejar caer su tierra en el punto donde la alta humedad interna del montículo da paso al aire más seco en la superficie, un buen marcador para el límite de su hogar. Pero no sabían si el comportamiento de las termitas al dejar caer tierra también dependía de otros factores.
Entonces construyeron un enjambre de termitas robóticas. Dado que los robots no tenían que interactuar con insectos reales, no tenían que parecer reales. En cambio, los robots eran carros del tamaño de un ladrillo que podían transportar y dejar caer bloques de colores sobre una superficie plana. Cada «termita» llevaba un sensor de humedad y estaba programada para transportar los bloques cuando la humedad era alta y dejarlos caer cuando bajaba la humedad. Mientras tanto, un tubo de hámster goteaba agua a medida que cada «termita» se movía, asegurando que la humedad fuera más alta en las áreas ocupadas.
“Sabemos que el robot solo está prestando atención a la humedad, porque eso es lo que le dijimos que hiciera”, dice Werfel. Y eso resultó ser suficiente: el enjambre de robots terminó dejando caer sus bloques en una versión bidimensional de la entrada de un montículo de termitas real . Los robots incluso sellaron la abertura en los días ventosos, como hacen las termitas reales. El experimento no prueba, por supuesto, que las termitas realmente utilicen una regla de humedad para construir sus montículos, señala Werfel, pero esa regla es suficiente para realizar la tarea.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer_public/5c/c1/5cc19109-2835-4a1d-af35-d6c53855ee0a/robotic_termites.jpeg)
El pez terror acecha
Los robots biomiméticos no solo revelan el comportamiento de los animales. Es posible que pronto se utilicen para manipularlo de formas útiles.
El pez mosquito, nativo del sur de los Estados Unidos, se ha convertido en una de las 100 especies invasoras más importantes del mundo. Giovanni Polverino, un ecologista conductual de la Universidad de Australia Occidental, decidió probar una forma inusual de control bio-robótico.
Polverino y sus colegas construyeron un pez robótico diseñado para parecerse a una lobina negra, un depredador clave del pez mosquito en sus vías fluviales nativas. Al programar el robot para que nadara agresivamente hacia el pez mosquito, esperaban aterrorizar a las especies invasoras sin afectar a las especies nativas de Australia. (Muchos animales salvajes muestran efectos duraderos del miedo ) .
Y eso es exactamente lo que vieron: tan solo 15 minutos por semana con el depredador robótico hizo que el pez mosquito perdiera grasa corporal y asignara más energía para escapar y menos para la reproducción. “El efecto sobre el pez mosquito es enorme, y la otra especie no se asusta para nada, porque copiamos a un depredador que en Australia no existe”, dice Polverino.
/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer_public/61/25/61252a6b-bdf8-4efd-a838-de9030e64241/robotic-largemouth-bass.jpeg)
Polverino tiene mucho más trabajo por hacer antes de poder desplegar su depredador artificial en el mundo real. “Nuestro robot funciona bien en el laboratorio”, dice. «Pero tiene una computadora cerca, una cámara web sobre el tanque y una batería con una vida útil corta».
Aun así, ahora está en conversaciones con un parque nacional en Queensland, donde dos especies de peces en peligro de extinción viven en piscinas pequeñas y transparentes que recientemente han sido colonizadas por peces mosquito. Debido a que las piscinas son tan pequeñas, podrían ser una buena primera prueba en la naturaleza. «No está listo ahora», dice Polverino, «pero es una posibilidad clara».
Muchas cosas pueden salir mal, por supuesto, cuando los investigadores intentan insinuar robots en grupos sociales animales y, a veces, los fracasos se deben a razones prosaicas. Cuando Biro trató de construir una paloma robótica para estudiar la toma de decisiones colectivas por grupos de palomas mensajeras, por ejemplo, el robot demostró ser incapaz de volar lo suficientemente rápido para mantenerse al día con la bandada real. Aún así, la oportunidad de probar el comportamiento animal de nuevas formas es lo suficientemente prometedora como para intentarlo de nuevo algún día. «Si hubiéramos conseguido que todo esto funcionara, habría habido todo tipo de cosas interesantes que hacer», dice. «Está en mi lista de cosas que espero hacer».







