
Los roboticistas de la CIA diseñaron Catfish Charlie para tomar muestras de agua sin ser detectadas. El motivo por el que querían un pez espía para tal fin sigue estando clasificado.
FUENTE: www.spectrum.ieee.org
AUTORA: ALLISON MARSH
En 1961, Tom Rogers, de la agencia Leo Burnett, creó Charlie the Tuna , una mascota de dibujos animados y portavoz de la marca StarKist. La popular campaña publicitaria se desarrolló durante varias décadas y su eslogan «Lo siento, Charlie» se enganchó rápidamente en el léxico estadounidense.
Cuando la Oficina de Programas y Tecnologías Avanzadas de la CIA comenzó a realizar una investigación centrada en los peces en la década de 1990, Charlie debió parecer el nombre en clave perfecto. Excepto que el Charlie de la CIA era un pez gato. Y era un robot.
Más precisamente, Charlie era un vehículo submarino no tripulado (UUV) diseñado para recolectar muestras de agua de manera subrepticia. Su manejador controlaba el pez a través de un auricular de radio con línea de visión. No se ha revelado mucho sobre la construcción del pez, excepto que su cuerpo contenía un casco de presión, un sistema de lastre y un sistema de comunicaciones, mientras que su cola albergaba la propulsión. Con 61 centímetros de largo, Charlie no establecería ningún récord de pez más grande.(Algunas especies de bagres pueden crecer hasta 2 metros). Se desconoce si Charlie obtuvo información útil, ya que los detalles de sus misiones aún están clasificados.
Para explorar entornos acuáticos, nada mejor que un robot
La CIA estaba lejos de estar sola en su búsqueda de UUV ni fue la primera agencia en hacerlo. En los Estados Unidos, dicha investigación comenzó en serio en la década de 1950, con la financiación de tecnología de la Marina de los Estados Unidos para operaciones de rescate y salvamento en aguas profundas. Otros proyectos analizaron los drones marinos para la vigilancia y la recopilación de datos científicos.
Aaron Marburg , un ingeniero eléctrico e informático principal que trabaja en UUV en el Laboratorio de Física Aplicada de la Universidad de Washington , señala que los océanos del mundo están en gran parte fuera del alcance de los buques tripulados. “La naturaleza de los océanos es tan grande que solo podemos ir allí con robots”, me dijo en una reciente llamada de Zoom. Para explorar esas regiones inexploradas, dijo, «nos vemos obligados a resolver los problemas técnicos y hacer que los robots funcionen».
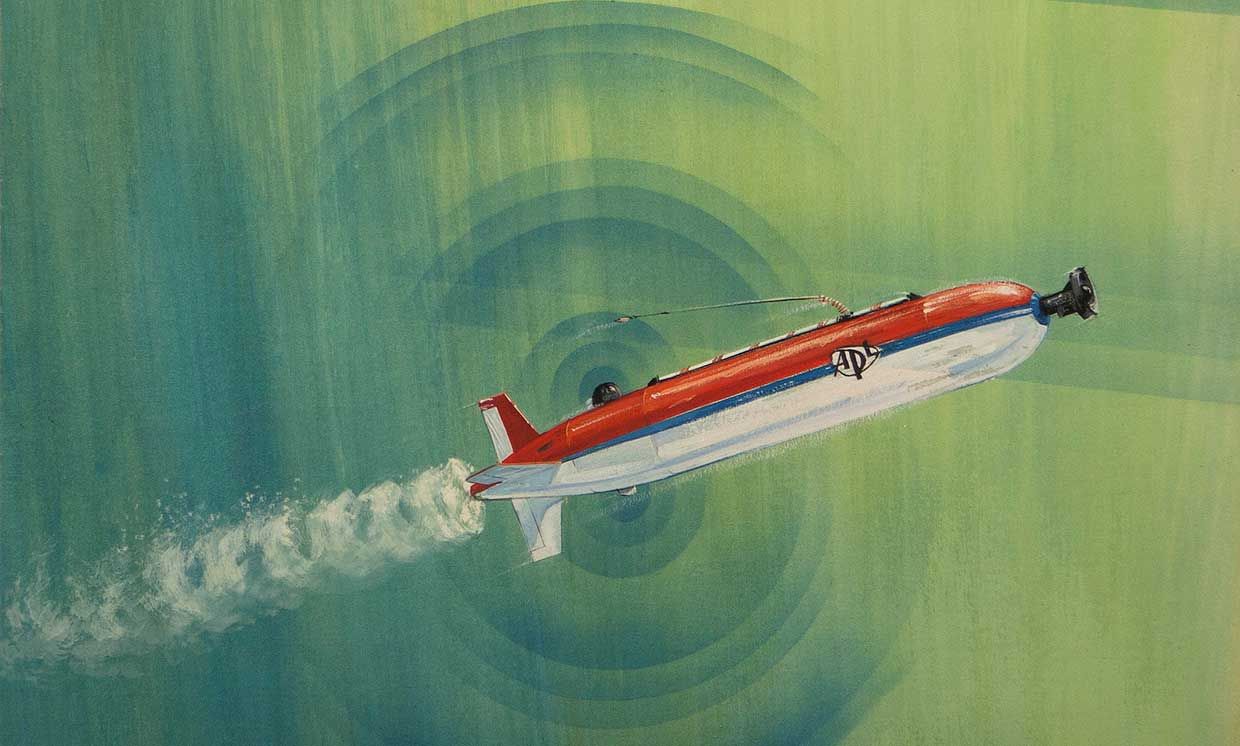
Uno de los primeros UUV se encuentra en el pasillo fuera de la oficina de Marburg: el vehículo de investigación submarino autopropulsado, o SPURV, desarrollado en el laboratorio de física aplicada a partir de finales de los años 50. El propósito original de SPURV era recopilar datos sobre las propiedades físicas del mar, en particular la temperatura y la velocidad del sonido. A diferencia de Charlie, con su exterior de pez, SPURV tenía una forma utilitaria de torpedo que estaba más en línea con su misión. Con poco más de 3 metros de largo, podía sumergirse a 3.600 metros, tenía una velocidad máxima de 2,5 m / s y funcionaba durante 5,5 horas con una batería. Los datos se registraron en cinta magnética y luego se transfirieron a un registrador de tiras de papel fotosensible u otro medio compatible con computadora y luego se trazaron usando un IBM 1130 .
Con el tiempo, la instrumentación de SPURV se volvió más capaz y el alcance del proyecto se expandió. En un estudio, por ejemplo, SPURV llevaba un fluorómetro para medir la dispersión del tinte en el agua, para respaldar los estudios de estela. El proyecto fue tan exitoso que se desarrollaron SPURV adicionales, que finalmente completaron casi 400 misiones cuando terminó en 1979.
Trabajar con robots submarinos, dice Marburg, significa equilibrar los riesgos técnicos y los objetivos de la misión con las limitaciones de financiación y otros recursos. El apoyo a la investigación puramente especulativa en esta área es escaso. El objetivo, entonces, es construir UUV que sean simples, efectivos y confiables. “Nadie quiere escribir un informe a sus patrocinadores diciendo: ‘Lo siento, las baterías se agotaron y perdimos nuestro pez robot de un millón de dólares’”, dice Marburg.
Un pez robot llamado SoFi
Desde SPURV, ha habido muchos otros vehículos submarinos no tripulados, de diversas formas y tamaños y para diversas misiones, desarrollados en los Estados Unidos y en otros lugares. Los UUV y sus primos autónomos, los AUV, ahora se utilizan de forma rutinaria para la investigación científica, la educación y la vigilancia.
Al menos algunos de estos robots se han inspirado en los peces. A mediados de la década de 1990, por ejemplo, los ingenieros del MIT trabajaron en un RoboTuna, también apodado Charlie. Modelado libremente en un atún de aleta azul, tenía un sistema de propulsión que imitaba la aleta caudal de un pez real. Esta fue una gran desviación de los tornillos o hélices utilizados en UUV como SPURV. Pero este Charlie nunca nadó solo;siempre estuvo atado a un banco de instrumentos. El siguiente esfuerzo del grupo MIT, un RoboPike llamado Wanda, superó esta limitación y nadó libremente, pero nunca aprendió a evitar chocar contra los lados de su tanque.
Avance rápido 25 años, y un equipo del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT presentó SoFi, un robot decididamente más sospechoso diseñado para nadar junto a peces reales sin molestarlos. Controlado por un teléfono Super Nintendo adaptado, SoFi podía bucear más de 15 metros, controlar su propia flotabilidad y nadar hasta 40 minutos entre cargas de batería. Al señalar que los creadores de SoFi probaron sus peces robot en las hermosas aguas de Fiji, Evan Ackerman de IEEE Spectrum señaló: “Una parte de mí está convencida de que los especialistas en robótica emprenden proyectos como estos … porque es una excelente manera de justificar un viaje a algún lugar exótico . «
SoFi, Wanda y ambos Charlies son ejemplos de biomimética, un término acuñado en 1974 para describir el estudio de los mecanismos, procesos, estructuras y sustancias biológicos. La biomimética mira a la naturaleza para inspirar el diseño.
A veces, la tecnología resultante demuestra ser más eficiente que su contraparte natural, como descubrió Richard James Clapham mientras investigaba peces robóticos para su doctorado. en la Universidad de Essex, en Inglaterra. Bajo la supervisión del experto en robótica Huosheng Hu , Clapham estudió el movimiento de natación de Cyprinus carpio, la carpa común. Luego desarrolló cuatro robots que incorporaron la natación en forma de carpa, el más capaz fue iSplash-II . Cuando se probó en condiciones ideales, es decir, un tanque de 5 metros de largo, 2 metros de ancho y 1,5 metros de profundidad, el iSpash-II obtuvo una velocidad máxima de 11,6 longitudes corporales por segundo (o aproximadamente 3,7 m / s). Eso es más rápido que una carpa real, que promedia una velocidad máxima de 10 longitudes corporales por segundo. Pero el iSplash-II no alcanzó el rendimiento máximo de un pez que se lanza rápidamente para evitar a un depredador.
Por supuesto, nadar en una piscina de prueba o en un lago plácido es una cosa; sobrevivir a la rudeza de una ola rompiente es otra cuestión. Esto último es algo que la roboticista Kathryn Daltorio ha explorado en profundidad.
Daltorio, profesor asistente en la Universidad Case Western Reserve y codirector del Centro de Investigación de Robótica de Inspiración Biológica , ha estudiado los movimientos de cucarachas, lombrices de tierra y cangrejos en busca de pistas sobre cómo construir mejores robots. Después de ver a un cangrejo navegar desde la playa de arena hasta aguas poco profundas sin ser desviado por una ola, se inspiró para crear un robot anfibio con pies cónicos y curvos que podrían excavar en la arena. Este diseño permitió a su robot resistir fuerzas de hasta el 138 por ciento de su peso corporal.
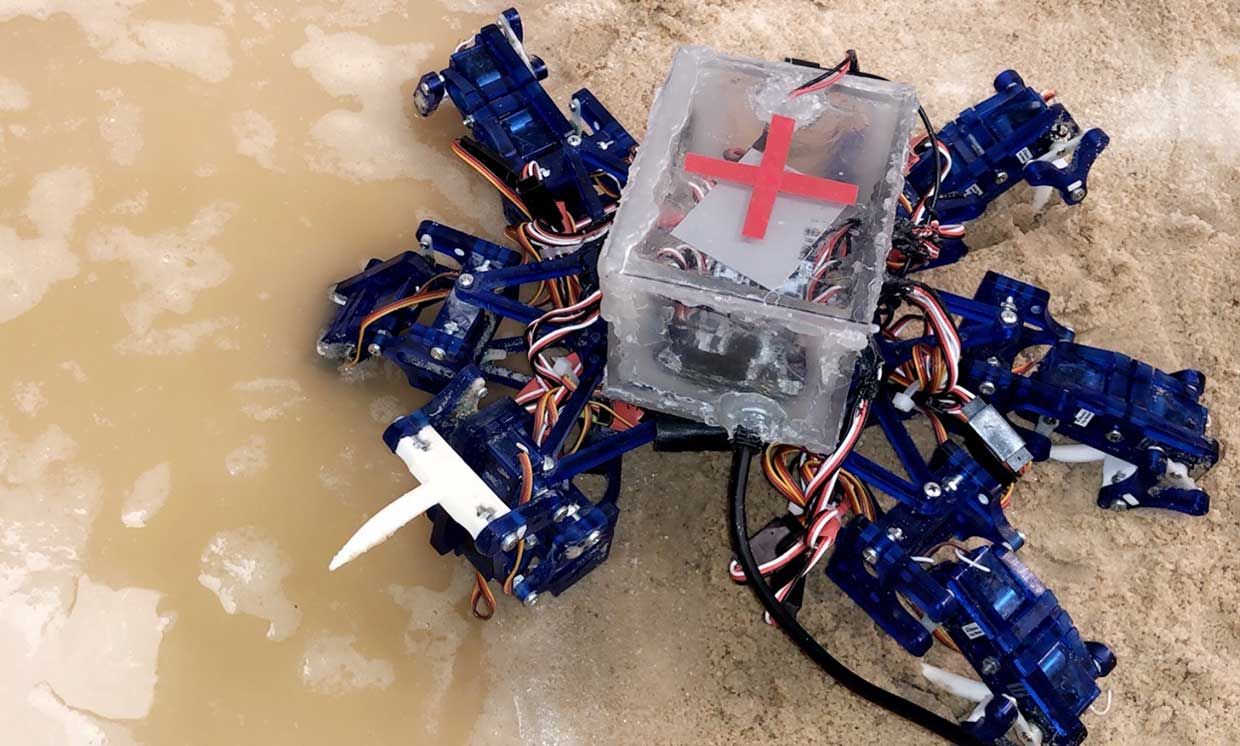
En sus diseños, Daltorio sigue la famosa máxima del arquitecto Louis Sullivan: La forma sigue a la función. Ella no está tratando de imitar la estética de la naturaleza —su robot tiene solo un parecido pasajero con un cangrejo— sino más bien la mejor funcionalidad. Observa cómo los animales interactúan con su entorno y roba las mejores ideas de la evolución.
Y, sin embargo, admite Daltorio, también hay un lugar para los peces robóticos de aspecto realista, porque pueden capturar la imaginación y despertar el interés por la robótica y la naturaleza. Y, a diferencia de un humanoide hiperrealista, es poco probable que un pez robótico caiga en el valle espeluznante.
Al escribir esta columna, me encantó encontrar muchos ejemplos recientes de este tipo de peces robóticos. Ryomei Engineering, una subsidiaria de Mitsubishi Heavy Industries, ha desarrollado varios: un robo-celacanto, un koi dorado robótico y una carpa robótica. El celacanto fue diseñado como una herramienta educativa para acuarios, para presentar un espécimen realista de un pez que rara vez se ve y que a menudo solo se conoce por su registro fósil. Mientras tanto, ingenieros de la Universidad de Kitakyushu en Japón crearon Tai-robot-kun, un besugo de aspecto creíble. Y un equipo de Evologics, con sede en Berlín, ideó la manta raya BOSS.
Cualquiera que sea su propósito oficial, estas robocreaturas inspiradas en la naturaleza pueden inspirarnos a cambio. Los UUV que abren nuevas y maravillosas vistas sobre los océanos del mundo pueden ampliar la capacidad de exploración de la humanidad. Los creamos y ellos nos mejoran, y eso me parece un intercambio muy justo y digno.







