
FUENTE: www.okdiario.com
AUTOR: FRANCISCO MARÍA
Un programa informático que controla a un robot utilizando las señales eléctricas emitidas por el cerebro podría ser de gran ayuda para que los pacientes tetrapléjicos puedan realizar algunas tareas por su propia cuenta. Desde hace muchos años, un grupo de investigadores ha desarrollado este sistema, mediante el cual los pacientes pueden mover un brazo robótico solamente con su pensamiento.
Robots controlados por la mente ayudarán a pacientes tetrapléjicos
Los pacientes tetrapléjicos son incapaces de hablar o de realizar el más mínimo movimiento, por lo cual los sistemas informáticos que requieren de funciones táctiles y de voz no son de utilidad.
Los déficits neurológicos y las correspondientes discapacidades motoras resultantes, son graves, permanentes, y les impiden realizar las tareas más simples, como tomar cualquier objeto.
La directora del Laboratorio de Algoritmos y Sistemas de Aprendizaje, Aude Billard, asegura que la asistencia de estos nuevos robots ayudará estas personas a mejorar su calidad de vida, ya que ellos harán las tareas en su lugar.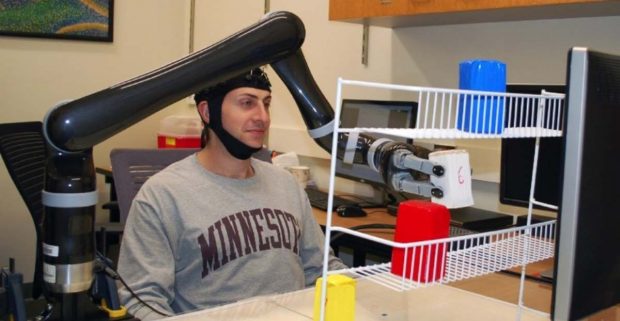
El algoritmo capaz de leer los pensamientos
Para los científicos. el objetivo era ayudar a los pacientes paralizados y debían encontrar una manera de que se pudieran comunicar con el robot sin hablar o moverse. Para ello, desarrollaron un algoritmo basado en los pensamientos de un paciente y lo pusieron en actividad mediante un cubrecabezas equipado con electrodos.
Los electrodos estimulan, de igual forma que un electroencefalograma, al cerebro y lo único que tiene que hacer el paciente es mirar al robot.
Cuando el brazo robótico hace un movimiento incorrecto, el cerebro del paciente emitirá un mensaje de error, como si estuviera diciendo “No, así no”. Mediante el proceso de prueba y error, el algoritmo mejora las decisiones del robot en cuanto a la dirección y la velocidad del movimiento.
El robot puede determinar cuánto y cómo deberá moverse, en principio con solo esta orden negativa. Pero, además, aprende sorprendentemente rápido y, generalmente solo necesita de tres a cinco intentos para encontrar el movimiento correcto, aunque hay que confirmarle sus aciertos y errores manualmente.
Según el autor principal del estudio, Iason Batzianoulis, lo que resultó sumamente difícil fue vincular la actividad cerebral de un paciente con el sistema de control del robot, pero el mayor desafío fue el desarrollo de la tecnología de detección de señales de error.
Los científicos esperan poder usar su algoritmo para controlar las sillas de ruedas y que el paciente sea capaz de trasladarse con solo pensar en ello.







