
FUENTE: www.chemistryworld.com
AUTOR: James Urquhart
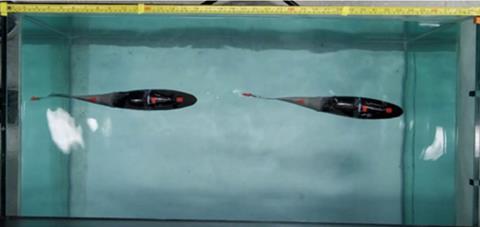
Una trucha robótica no solo nada silenciosamente a través del agua a velocidades similares a su contraparte natural, sino que también puede recolectar suficiente energía para alimentar sensores. El trabajo de investigadores en Estados Unidos podría permitir a los robots infiltrarse en bancos de peces para estudiarlos, monitorear la contaminación marina o incluso operar como espías navales.
Los robots de natación no son nada nuevo, pero a menudo requieren motores voluminosos y ruidosos con mecanismos complejos. Los peces robóticos más recientes se han fabricado utilizando materiales inteligentes blandos, pero solo pueden nadar lentamente o dependen de los cambios de temperatura para funcionar.
Alper Erturk del Instituto de Tecnología de Georgia cree que los materiales piezoeléctricos son la respuesta para superar estas limitaciones. Su grupo fabricó el primer pez robot piezoeléctrico sin ataduras en 2013 . Ahora, el equipo de Erturk se ha basado en este trabajo al adaptar un robot al tamaño y la forma de una trucha arco iris, alcanzando velocidades comparables a las reales.
Los materiales piezoeléctricos comprenden fibras flexibles que se expanden y contraen como músculos en respuesta a la electricidad. Sin embargo, también pueden generar electricidad cuando las fibras son vibradas por una fuerza externa como el viento o el agua que fluye. Los robots voladores y terrestres se han hecho con el material antes, pero este es el primer prototipo submarino.
El pez robótico de Erturk tiene una aleta de cola de silicona que está intercalada entre dos capas de un material piezoeléctrico. Este material contiene fibras de titanato de circonato de plomo que se separan entre capas de una resina epoxi flexible. Esto se superpone con electrodos impermeables incrustados en una película de poliimida.
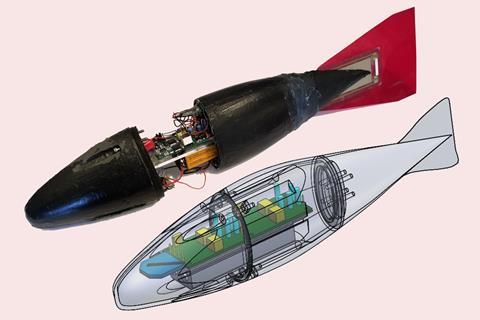
El cuerpo del robot contiene todos sus componentes electrónicos, batería y un módulo Bluetooth, que permite a los investigadores controlarlo con una aplicación de teléfono.
La aleta caudal es extraíble y constituye un tercio de los 30,5 cm de longitud del robot, similar a una trucha adulta. Un cuerpo y una nariz huecos, impresos en 3D a partir de ácido poliláctico, contienen componentes electrónicos, baterías y componentes de recolección de energía. Un receptor Bluetooth permite controlar las vibraciones de la aleta a través de una aplicación de teléfono.
Los experimentos en el agua mostraron que el robot podía lograr un empuje comparable al de una trucha arco iris, alcanzando una velocidad de nado de casi una longitud corporal por segundo. Cuando el robot estaba atado, la turbulencia del agua puede hacer vibrar la aleta de la cola, lo que le permite recolectar energía, aunque no lo suficiente para impulsar su propio movimiento.
«Hacerlo autoalimentado es factible, pero llevaría mucho tiempo recolectar la energía del flujo y almacenarla en una batería», dice Erturk. «Se necesitarían muchas horas de recolección para unos minutos de natación». Sin embargo, la energía recolectada podría usarse para sensores inalámbricos a bordo para monitorear entornos submarinos. El uso de actuadores piezoeléctricos significa que el concepto podría ampliarse o reducirse hasta un tamaño tan pequeño como robots de tamaño milimétrico.
«Los [investigadores] están mostrando resultados interesantes utilizando un actuador piezoeléctrico aplicado a un pez robótico», dice Robert Katzschmann, que desarrolla robots blandos en el Instituto Federal Suizo de Tecnología de Zúrich. ‘Tendría curiosidad por ver si el robot también podría recolectar energía mientras se despliega sin ataduras en agua corriente. Al realizar conversiones de energía reversibles, el diseño del actuador piezoeléctrico también podría permitir la recolección de energía y la amortiguación de ruido simultáneas en entornos industriales.







