
FUENTE: www.theconversation.com
Imagínese corriendo por un sendero de cemento y luego, de repente, por arena seca. Solo para mantenerse erguido, tendría que reducir la velocidad y cambiar la forma en que corre. De la misma manera, un robot que camina tendría que cambiar su forma de andar para manejar diferentes superficies.
Generalmente, los humanos y la mayoría de los robots solo podemos cambiar la forma en que corremos. Pero, ¿y si también pudiéramos cambiar la forma de nuestro cuerpo para correr lo más rápido y seguro posible en cualquier superficie?
Nos gustaría confiar en los robots para tareas difíciles y peligrosas, desde la inspección de reactores nucleares averiados hasta la exploración espacial. Para estas tareas, un cuerpo estático podría limitar la adaptabilidad del robot. Un cuerpo que cambia de forma podría marcar la diferencia entre el éxito y el fracaso en estos entornos inesperados. Aún mejor, un robot que cambia de forma podría aprender la mejor forma corporal para diferentes entornos y adaptarse a nuevos entornos a medida que los encuentre.
En colaboración con la Universidad de Oslo, hemos probado con éxito esta idea con un robot de cuatro patas que adapta su cuerpo para caminar sobre nuevas superficies a medida que las ve, con un rendimiento mejor que un robot de cuerpo estático. Nuestra investigación se publica en Nature Machine Intelligence.
Un cuadrúpedo que cambia de forma
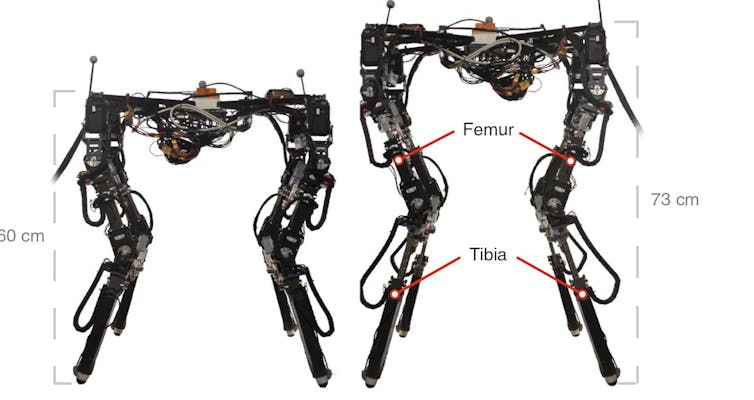
DyRET, el robot dinámico para pruebas incorporadas, o «el animal» en noruego de su creador, Tønnes Nygaard , fue diseñado para explorar la idea de un robot que cambia de forma.Cada una de las cuatro patas de DyRET tiene dos secciones telescópicas, de modo que puede cambiar la longitud de sus muslos o espinillas. Los ajustes se realizan mediante motores integrados en las patas y las longitudes se pueden cambiar automáticamente mientras el robot está en funcionamiento.
Los motores pueden cambiar la altura de DyRET en aproximadamente un 20%, de 60 cm a 73 cm de altura. Esos 13 cm marcan una diferencia dramática en la caminata del robot.Con piernas cortas, DyRET es estable pero lento, con un centro de gravedad bajo. En su modo más alto, DyRET es más inestable mientras camina, pero su paso es mucho más largo, lo que le permite viajar más rápido y superar obstáculos.
DyRET también tiene sensores para realizar un seguimiento de lo que camina. Cada uno de los pies de DyRET tiene un sensor de fuerza que puede sentir la dureza del suelo. Una cámara 3D apunta al suelo entre las patas delanteras de DyRET para estimar qué tan accidentado es el suelo.
Aprendiendo a adaptarse
Cuando DyRET está caminando, detecta continuamente el entorno a través de sus pies y su cámara 3D. Cuando el robot detecta un cambio en las condiciones del suelo, puede cambiar a la mejor longitud de pierna. Pero, ¿cómo sabe el robot qué forma de cuerpo funciona mejor?
Exploramos dos formas para que DyRET aprenda la mejor configuración de patas para diferentes situaciones: un entorno controlado, en interiores con superficies conocidas y una prueba en el mundo real en exteriores.
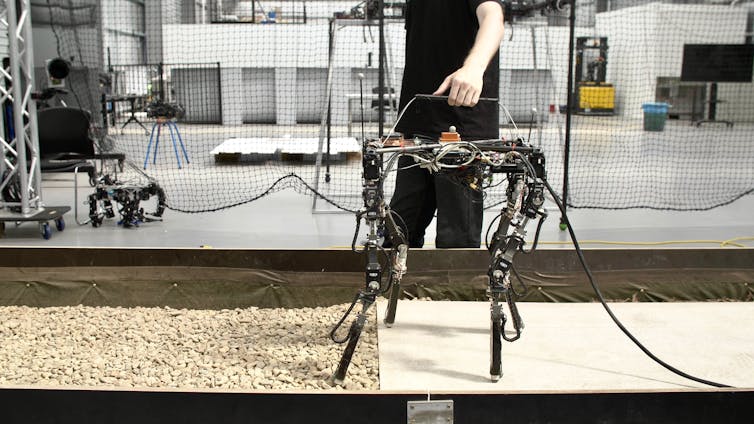
En nuestras pruebas controladas, DyRET caminó dentro de cajas de unos 5 metros de largo que contenían diferentes superficies para caminar: arena, grava y láminas de fibrocemento duro. El robot caminó sobre cada material en cada una de las 25 configuraciones de patas diferentes para registrar la eficiencia de su movimiento. Dados estos datos, probamos la capacidad del robot para detectar automáticamente un cambio en la superficie para caminar dentro de las cajas y elegir la mejor forma del cuerpo.
Si bien nuestros experimentos controlados demostraron que DyRET podía adaptar su cuerpo con éxito a las superficies sobre las que había caminado antes, el mundo real es un lugar mucho más variable e impredecible. Demostramos que este método podría extenderse a terrenos invisibles al estimar la mejor forma corporal para cualquier superficie que encuentre el robot.
En nuestros experimentos al aire libre, DyRET usó un modelo de aprendizaje automático, sembrado con conocimiento sobre la mejor configuración de patas para una combinación dada de dureza y rugosidad del terreno tomada de las pruebas controladas. A medida que el robot camina, predice continuamente la mejor forma corporal para el terreno a medida que lo encuentra, mientras actualiza su modelo con medidas de qué tan bien puede caminar. En nuestros experimentos, las predicciones de DyRET mejoran a medida que camina, lo que le permite generar rápidamente movimientos eficientes, incluso para terrenos que no ha visto antes.

¿Son los robots que cambian de forma el futuro?
DyRET explora la idea de «cognición incorporada» en un robot: es decir, que el cuerpo de hardware de un robot se puede utilizar para resolver problemas en colaboración con su cerebro de software al vincularlos estrechamente con el entorno. En lugar de que el cuerpo de DyRET sea una limitación para su movimiento, es en sí mismo una forma adaptativa de resolver problemas en entornos desafiantes.
Esto es increíblemente beneficioso, especialmente cuando no podemos predecir las condiciones ambientales exactas de antemano, lo que hace que elegir una sola forma de robot «buena» sea muy difícil. En cambio, estos robots se adaptarían a una amplia variedad de condiciones ambientales a través del cambio de forma.
Nuestra prueba de concepto tiene poderosas implicaciones para el futuro del diseño robótico, desbloqueando entornos actualmente imposibles que son muy desafiantes y variables. Los futuros robots que cambian de forma podrían usarse en el fondo del mar o para misiones a largo plazo en el espacio.







