FUENTE: www.inceptivemind.com
AUTOR: ASHWINI SAKHARKAR
Solemos imaginar al robot con una carcasa sólida y resistente, capaz de realizar una serie de movimientos. Ahora los ingenieros están adaptando la inspiración del diseño de la naturaleza a la robótica, como estructuras con forma de ventosa inspiradas en pies de tubo y una adaptación robótica de la mandíbula de erizo de mar.
Durante la Conferencia Internacional sobre Robots y Sistemas Inteligentes (IROS), ingenieros de Harvard presentaron UrchinBot, un robot inspirado en un erizo de mar. La idea es acercar el sistema de movilidad de erizos de mar a la robótica para aquellos casos en los que haya que realizar funciones de movilidad bajo el mar.
Se han elegido los erizos de mar juveniles por tener un cuerpo más simple que el de los adultos, a pesar de tener las mismas características básicas, y por tanto más fáciles de replicar en robótica.
Este robot de aspecto más extraño «incorpora características anatómicas exclusivas de los erizos de mar», accionado por sistemas neumáticos o hidráulicos y que funciona sin atadura. Sirve como banco de pruebas para ayudar a los investigadores a identificar características físicas y técnicas de control que podrían conducir a nuevos tipos de robots submarinos más versátiles y efectivos.
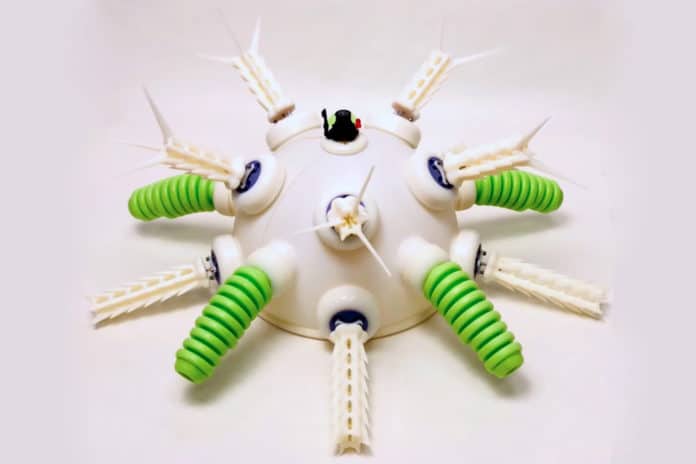
Se ha prestado especial interés en reproducir con precisión la geometría y los rangos de movimiento de las características anatómicas. Por lo tanto, se han replicado los dos tipos de apéndices de erizo de mar: espinas móviles y patas de tubo pegajosas. El cuerpo de UrchinBot tiene cinco pies flexibles (estructuras verdes) y diez espinas rígidas móviles. Estos apéndices son impulsados por actuadores dentro del cuerpo del robot para permitir que se arrastre en una dirección específica o gire.
Todas las cúpulas están interconectadas dentro del robot, por lo que las espinas no se pueden operar por separado, generando movimientos de rotación simétricos. Los erizos de verdad excretan sustancias pegajosas que usan para pegarse a las superficies y luego excretan una enzima que disuelve el pegamento cuando quieren moverse. Este ha sido reemplazado por un sistema de imanes extensibles y retráctiles.
El resto del cuerpo tiene bombas, válvulas y dispositivos electrónicos que le permiten moverse de forma autónoma bajo el mar.
Los investigadores señalan que UrchinBot no será lo suficientemente rápido para moverse bajo el mar, lo que se espera con la mayoría de los robots bioinspirados. La velocidad máxima es de 6 mm / s, o 0,027 longitudes corporales por segundo, bastante más lenta que la de un erizo juvenil, pero la mitad de rápida que la de un erizo adulto.
Los investigadores afirman que podría ser útil para aplicaciones de inspección y limpieza bajo el agua, especialmente en situaciones en las que las incrustaciones pesadas serían un desafío para los robots más convencionales.







