
FUENTE: www.cnnespanol.cnn.com
AUTORA:Ashley Strickland
Explorar debajo de la superficie de otros planetas puede ser la clave para determinar si alguna vez ha existido vida fuera de la Tierra.
Como han demostrado otras misiones, incluida la del módulo de aterrizaje InSight de la NASA, perforar la superficie de planetas como Marte es difícil, un poco demasiado difícil para profundizar más de unas pocas pulgadas en el subsuelo.
Recientemente, el rover Curiosity midió por primera vez el carbono orgánico total, un ingrediente necesario en las moléculas de la vida, en rocas marcianas. Pero no prueba que alguna vez existió vida en Marte, porque el carbono también puede ser producido por fuentes no vivas.

El concepto de un artista muestra a ReachBot usando sus brazos extensibles para explorar una cueva marciana.
Una nueva investigación sugiere que la mejor oportunidad de encontrar evidencia pasada o presente de vida en Marte requiere ir debajo de su superficie, al menos 6,6 pies (2 metros) por debajo. Marte tiene una atmósfera increíblemente delgada, lo que significa que la superficie del planeta rojo es bombardeada por radiación de alta energía del espacio, y eso podría degradar rápidamente sustancias como los aminoácidos que brindan evidencia frágil de vida.
Esas duras condiciones de superficie también presentan un desafío para los astronautas, razón por la cual los científicos han sugerido que las cuevas en otros planetas podrían ser la clave para futuras exploraciones. Vastos sistemas de cuevas en la Luna y Marte podrían actuar como refugios para futuros viajeros espaciales.
Las cuevas también podrían contener recursos como el agua, revelar más sobre la historia de un planeta y ser refugios para la evidencia de vida microbiana. En la Tierra, hay una variada gama de sistemas de cuevas, muchos de los cuales permanecen sin explorar, y albergan diversos grupos de microorganismos. Pero las cuevas son peligrosas, y dado que nunca hemos mirado dentro de una cueva marciana, es difícil saber qué esperar.
Antes de que los humanos aterricen en Marte y exploren su subsuelo, un grupo de científicos quiere enviar ReachBot, un robot diseñado para gatear y trepar a través de cuevas extraterrestres.

ReachBot también podría usarse para explorar cuevas lunares para ver si los astronautas podrían usarlas como recurso.
Un robot espeleólogo
La idea de ReachBot nació en 2018 cuando Marco Pavone, director del Laboratorio de Sistemas Autónomos de la Universidad de Stanford, y sus estudiantes intercambiaron ideas sobre conceptos para un explorador de cuevas marciano.
Sabían que el robot tendría que poder agarrar puntos de anclaje para poder moverse sin caerse, y si no podía encontrar suficientes puntos de anclaje, no llegaría muy lejos.
Uno de sus alumnos sugirió la idea de un pequeño robot con brazos extensibles que se extienden como una cinta métrica, que podría usarse de la misma manera que Spider-Man lanza telarañas para ayudarlo a navegar por el horizonte de la ciudad de Nueva York.
El concepto de robot tiene el tamaño de una pelota de baloncesto y un horno tostador y está cubierto con brazos extensibles equipados con pinzas espinosas que podrían agarrar objetos y agarrar o empujar las superficies rocosas y empinadas de las cuevas marcianas. Sería capaz de anclarse y arrastrarse largas distancias.
Cuando no se necesitan los brazos del robot, se enrollan para no estorbar.
Pavone, quien también es profesor asociado de aeronáutica y astronáutica en la Escuela de Ingeniería de la Universidad de Stanford, y sus alumnos llegaron a la idea de un robot con brazos extensibles. Crearon una propuesta para enviar al Programa de Conceptos Avanzados Innovadores de la NASA, que financia conceptos visionarios en el campo de la robótica espacial que podrían transformar futuras misiones.
El concepto ReachBot recibió fondos para la Fase I, que el equipo utilizó para realizar una serie de estudios que demostraron que el concepto era factible, dijo Pavone.
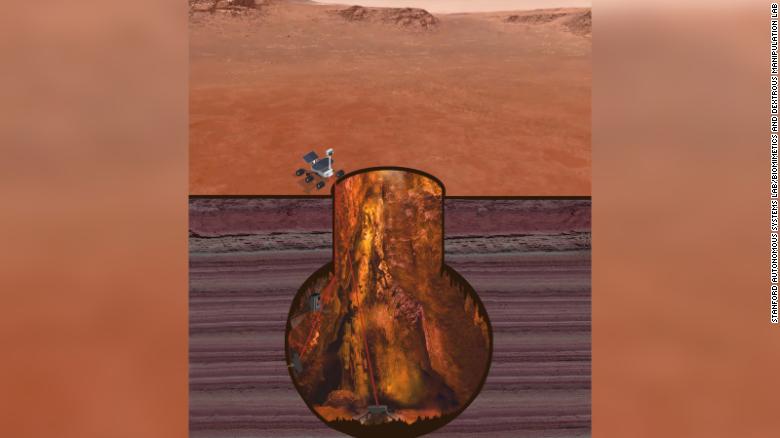
Esta ilustración muestra cómo se conectaría ReachBot a un rover en la superficie marciana.
Ahora, ReachBot ha recibido financiación para la Fase II. El equipo usará los próximos dos años para trabajar en simulaciones 3D, un prototipo de robot, desarrollar estrategias que ayuden al robot a evitar riesgos y probar ReachBot en un entorno de misión realista, probablemente en una cueva en Nuevo México o California. Estas pruebas determinarán cómo se podría usar ReachBot para futuras exploraciones.
Explorando debajo de Marte
Si ReachBot se convierte en su propia misión, probablemente dependerá de un robot más grande y más capaz, como un rover, para acceder a las cuevas que explorará. El rover llevará a ReachBot a la entrada de la cueva o lo dejará en la pared de un acantilado, que ReachBot podría escalar.
Es probable que ReachBot esté equipado con cámaras, microscopios y un método de detección remota llamado LIDAR. Pero los instrumentos requieren energía y agregan peso, además del sistema de energía y comunicación que necesitará el robot.
El equipo prevé que ReachBot estará conectado al rover con destino a la superficie, que puede proporcionar energía y actuar como un relé de comunicaciones, dijo Stephanie Newdick, estudiante de doctorado en aeronáutica y astronáutica en la Escuela de Ingeniería de la Universidad de Stanford.
Además de enviar datos al rover, ReachBot también puede tener un sistema de cinta transportadora que le permita recolectar muestras y enviarlas a la superficie. El rover será más grande y tendrá instrumentos que puedan analizar las muestras en detalle, dijo Newdick.
Cualquier hallazgo inicial de ReachBot puede determinar el siguiente paso para las misiones de seguimiento.
«Las cuevas son ambientes riesgosos, pero son científicamente interesantes», dijo Newdick. «Nuestra idea para este robot es llegar lejos antes de que la gente llegue allí para hacer ciencia interesante y explorar el área».
Destinos futuros
Las cuevas marcianas son solo una posible oportunidad para un robot como ReachBot. Pavone ve el potencial de estos robots para operar junto a los humanos en un lugar como la Estación Espacial Internacional, manejando algunas tareas para que los astronautas puedan hacer un mejor uso de su tiempo.
El Gateway, un puesto lunar planificado que existirá entre la Tierra y la Luna, no estará tripulado todo el tiempo como la estación espacial. Los robots como ReachBot podrían realizar tareas de mantenimiento y mantenimiento, dijo Newdick. ReachBot también podría arrastrarse dentro de las cuevas lunares que pueden servir como recurso para los astronautas que exploran la luna.
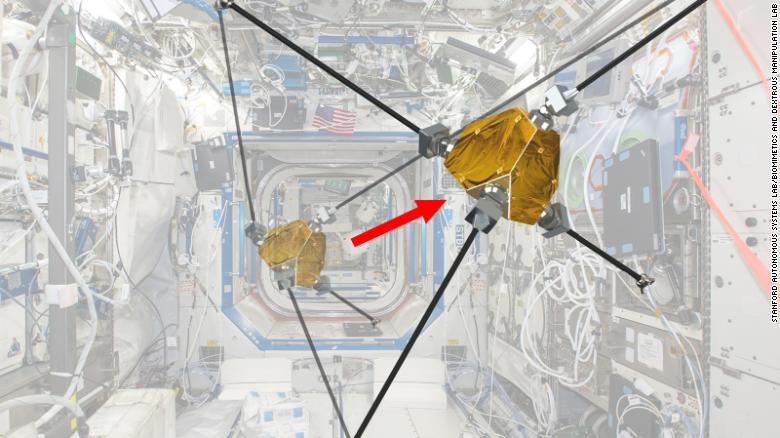
ReachBot también puede ser útil en entornos como la Estación Espacial Internacional o el Gateway.
En el futuro, el equipo cree que ReachBot podría personalizarse según su destino, lo que influiría en las opciones de diseño, como su tamaño y la cantidad de brazos extensibles, dijo Pavone.
Los extremos de los brazos de ReachBot también podrían estar equipados con instrumentos científicos que pueden entrar en pequeñas grietas y hendiduras donde un robot no cabría.
Con tantas capacidades, el equipo ve su creación como una forma de explorar más a fondo nuestro sistema solar, yendo a lugares donde los humanos aún no pueden pisar.







