Científicos del MIT desarrollaron una técnica para que un robot guepardo adaptara su movilidad con aprendizaje.
FUENTE: noticiasrcn.com
El aprendizaje en los robots es un tema muy importante para poder adaptar sus mejoras y sacar todo su potencial, pero un grupo de científicos del MIT decidió darle un toque más de base y ensañarle a caminar y correr a un robot desde cero a través de un sistema.
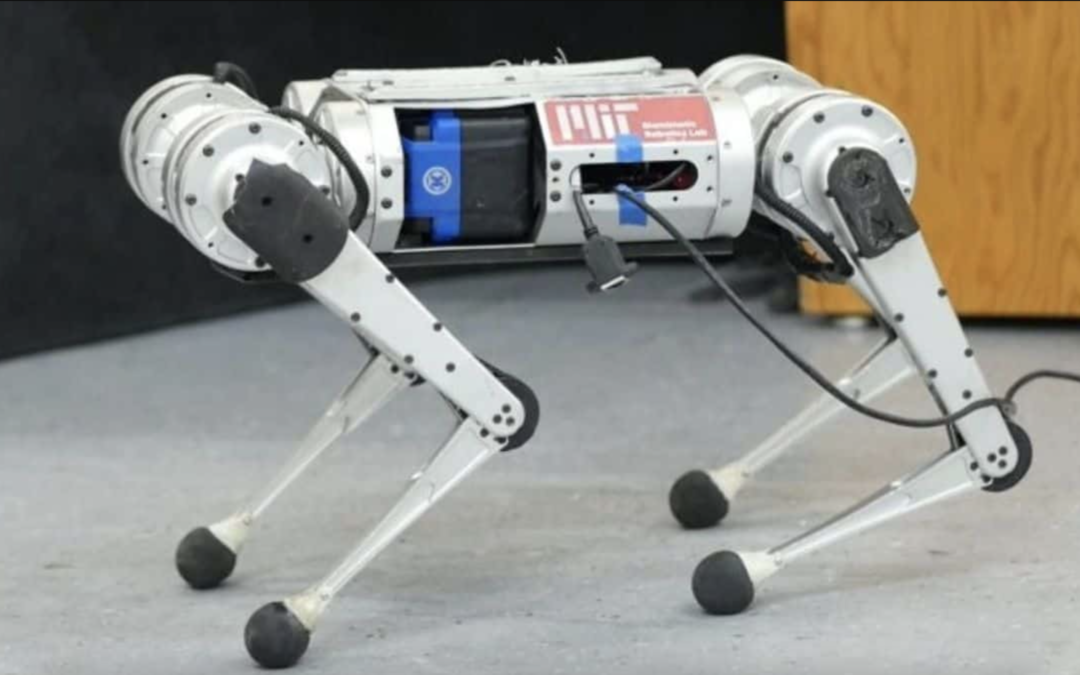
Si bien el resultado no da un dispositivo con una movilidad totalmente fluida, el final del proyecto permitió el robot Mini Cheetah alcanzara una velocidad de 14.4 kilómetros por hora, la más rápida hasta ahora.
¿Cómo le enseñaron a correr a un robot?
Los humanos normalmente tardan un par de años en aprender a caminar y a correr con facilidad, pero con este sistema lograron que el robot aprendiera mucho más rápido con solo tres horas en la simulación.
Y para lograrlo desarrollaron un sistema en el que simularon 4 mil versiones del robot caminando y luego corriendo en todas las direcciones. Estos robots digitales se probaron en varios tipos de superficies para poder programar diferentes niveles de características, como fricción y suavidad.
Luego todo este sistema fue transferido al robot real para que entendiera cómo debía moverse en el césped, pavimiento, hielo y grava, además de aprender con facilidad las técnicas positivas e ir descartando las negativas.
El robot guepardo no cuenta con una cámara para ver su entorno, pero sí logra calcular su equilibrio y realizar sus movimientos según ese seguimiento. Por ejemplo, si está caminando sobre césped, puede consultar su entrenamiento digital sobre una superficie con la misma fricción y suavidad que el césped real.
“En lugar de que un ser humano prescriba exactamente cómo debe caminar el robot, el robot aprende de un simulador y de la experiencia para lograr esencialmente la capacidad de correr tanto hacia adelante como hacia atrás y girar, muy, muy rápido”, dice Gabriel Margolis, investigador de IA en MIT que co-desarrolló el sistema.
¿Para qué sirve este avance en robótica?
Aunque parezca algo poco útil para la vida diaria, la realidad es que es un sistema importante para mejorar la movilidad de los robots, que “no caminan rápido, o no pueden correr. E incluso cuando caminan, simplemente caminan en línea recta. O pueden girar, pero no pueden realizar comportamientos ágiles como girar a gran velocidad”.
Por lo que un desarrollo de este estilo puede optimizar de gran manera la movilidad de estos dispositivos y también pensar en más ideas de inclusión, ya que su mejora se puede hacer mucho más rápida a través de actualizaciones.







